3D Battlefield Local Update Benchmark
城市战场仿真场景中“三维战场场景局部更新”功能的回归测试基准集。

适用对象:城市战场仿真场景中“三维战场场景局部更新”功能的回归测试
输入:无人机 / 无人狗等侦察源采集的侦察录像(及位姿元数据)
待测能力:基于侦察数据,检测战场局部变化,并将原有三维场景同步更新(几何替换、目标插入/删除、动态目标同步、语义/通行性更新),实现态势实时刷新。
1. 通用约定与指标体系
1.1 设计原则
- 覆盖性
变化类型覆盖“正变化(新增)、负变化(消失)、形变(损毁)、动态(时敏)、语义(通行性)、地表(高程)”六大维度。
- 可量化
每类想定都附带真值(Ground Truth)定义与数值化通过门限,避免“看起来更新了”这类主观判断。
- 抗作弊
每个场景都强制保留静默对照区(无变化区域),专门检验模块“是否乱改未变化的部分”——这是态势更新最危险的失效模式。
- 难度分层
从单一清晰变化 → 弱信号/强干扰 → 退化感知 → 复合密集,形成梯度
- 可复现
所有摆放、动线、航线用统一坐标与参数描述,UE内可一次性复刻。
1.2 坐标与标注约定
采用本地 ENU 坐标系:原点取地块西南角,X 轴指东、Y 轴指北、Z 轴朝上,单位米。
地块尺寸记为 $W \times D$(东西 × 南北)。点位记为 (x, y, z),航点同。
每个变化实例须导出真值条目:{id, 类别, 中心点(x,y,z), 朝向yaw, 包围盒尺寸(l,w,h), 损毁等级, 出现/消失标志, 轨迹(若动态)}。
真值由 UE 场景脚本直接导出(场景即真值来源),无需人工再标注。
1.3 侦察源能力假设(用于统一录制条件设定,可按实际平台标准调整)
| 平台 | 传感器 | 典型作业参数 | 用途 |
|---|---|---|---|
| 无人机(旋翼) | EO 4K@30fps + 云台,选配 IR/多光谱 | 飞行高度 30–120 m AGL,巡航 3–8 m/s,盘旋凝视 | 区域测绘、顶视/斜视、运动目标跟踪 |
| 无人狗(地面) | EO + 选配 LiDAR,传感器高 $\sim 0.5$ m | 1–2 m/s,可抵近/入室 | 低矮工事贴地侦察、内部走廊、坑深桥况近测 |
1.4 损毁分级标准
| 等级 | 名称 | 判定特征 |
|---|---|---|
| D0 | 无损 | 结构与外立面完好 |
| D1 | 轻度 | 门窗/外立面/装饰破损,承重结构完好 |
| D2 | 中度 | 局部墙体穿孔或单层塌落,结构基本完好 |
| D3 | 重度 | 多层或承重构件受损、局部坍塌、瓦砾外溢 |
| D4 | 摧毁 | 整体坍塌为瓦砾堆,原结构不可辨 |
1.5 统一指标定义
(1)变化检测匹配
预测变化实例与真值实例匹配,当且仅当:中心距 $\leq d_{\text{match}}$ 且类别一致(或三维 IoU $\geq 0.3$)。
建议 $d_{\text{match}} = 1.0$ m(静态)/ $2.0$ m(时敏目标)。
(2)检测层
$\text{Precision} = \frac{TP}{TP + FP},\text{Recall} = \frac{TP}{TP + FN},F1 = \frac{2,\text{Precision} \cdot \text{Recall}}{\text{Precision} + \text{Recall}}$
(3)定位精度
$e_{\text{pos}} = \left| \mathbf{p}{\text{pred}} - \mathbf{p}{\text{gt}} \right|{2},e{\text{yaw}} = \left| ,\text{wrap}\left( \theta_{\text{pred}} - \theta_{\text{gt}} \right), \right|$
(4)几何重建精度
三维包围盒交并比与点云/网格 Chamfer 距离:
$\text{IoU}{3D} = \frac{V{\text{pred}} \cap V_{\text{gt}}}{V_{\text{pred}} \cup V_{\text{gt}}}$
$d_{CD}\left( S_{1},S_{2} \right) = \frac{1}{\left| S_{1} \right|}\sum_{x \in S_{1}} \min_{y \in S_{2}}\left| x - y \right|{2}^{2} + \frac{1}{\left| S{2} \right|}\sum_{y \in S_{2}} \min_{x \in S_{1}}\left| x - y \right|_{2}^{2}$
(5)地表高程精度
$\text{RMSE}{z} = \sqrt{\frac{1}{N}\sum{i = 1}^{N}\left( z_{i}^{\text{pred}} - z_{i}^{\text{gt}} \right)^{2}}$
(6)时敏目标跟踪
位置 RMSE、速度误差 $e_{v} = \left| \mathbf{v}{\text{pred}} - \mathbf{v}{\text{gt}} \right|$、ID 切换次数、检测时延 $T_{\text{lat}}$(目标进入视野到被建立航迹的时间),并用 MOTA/MOTP 汇总。
(7)静默区稳定性(关键防作弊指标)
未变化区域被错误修改的占比:
$S_{\text{drift}} = \frac{\text{被修改的未变化体素}\text{(}\text{或面积}\text{)}}{\text{未变化区域总量}}$
要求越小越好。
(8)时效性
端到端更新时延 $T_{\text{update}}$:从单次侦察数据就绪到场景完成局部更新所耗时间(区分离线批处理模式与近实时模式)。
(9)鲁棒性保持率(退化条件场景)
$\rho = \frac{\text{得分}{\text{退化条件}}}{\text{得分}{\text{基准条件}}}$
1.6 通过门限
| 指标 | 建议门限 |
|---|---|
| 静态变化检测 F1 | $\geq 0.85$ |
| 时敏目标检测召回 | $\geq 0.90$ |
| 损毁分级(±1 级容差)准确率 | $\geq 0.90$;严格准确 $\geq 0.70$ |
| 静态目标位置误差 | 中位 $\leq 0.5$ m,95 分位 $\leq 1.0$ m |
| 朝向误差 | $\leq 15^{\circ}$ |
| 几何 $\text{IoU}_{3D}$(损毁体/工事体) | $\geq 0.50$ |
| 地表高程 $\text{RMSE}_{z}$ | $\leq 0.30,\mathrm{m}$ |
| TST 位置 RMSE / 速度误差 | $\leq 1.0,\mathrm{m} / \leq 1.0,\mathrm{m}\cdot\mathrm{s}^{-1}$ |
| TST 检测时延 / ID 切换 | $\leq 2,\mathrm{s} / \leq 1$ 次·目标$^{-1}$·分钟$^{-1}$ |
| 静默区稳定性 $S_{\text{drift}}$ | $\leq 2%$ |
| 鲁棒性保持率 $\rho$ | $\geq 0.75$ |
| 端到端更新时延 $T_{\text{update}}$(近实时模式) | $\leq 5$ s(按需设定) |
1.7 评分与判定
每个场景按其权重指标归一到 0–100 分,单场景 $\ge 70$ 记为通过。
Benchmark 综合分 = 各场景加权平均。
否决项:S4(时敏目标)与 S9(复合密集)设下限,任一低于 50 分则整体判不通过——因为这两项直接对应“实时态势”的核心价值。
2. 场景想定
S1 建筑物损毁
测试能力:几何形变检测、损毁等级判定、瓦砾/碎片建模、原有三维网格的局部替换。
场景范围:$180 \times 180$ m 城市街区。沿街布置 7 栋建筑(3–8 层混合),含主街、人行道、行道树。
基线(更新前)场景:所有建筑 D0 完好;街道整洁无碎片。
验证指标与通过判据:
损毁分级 ±1 级准确率 $\geq 0.90$,且 B1/B2/B3 的严格分级至少 2/3 正确。
形变体 $\text{IoU}_{3D} \geq 0.5$;瓦砾堆体积误差 $\leq 25%$;B2 楼高下降量误差 $\leq 1.0$ m。
B0 静默稳定性 $S_{\text{drift}} \leq 2%$(误把完好楼改成损毁即判该项失败)。

未损毁状态(baseline)

D2中度损毁状态

D3重度损毁状态

D4摧毁状态
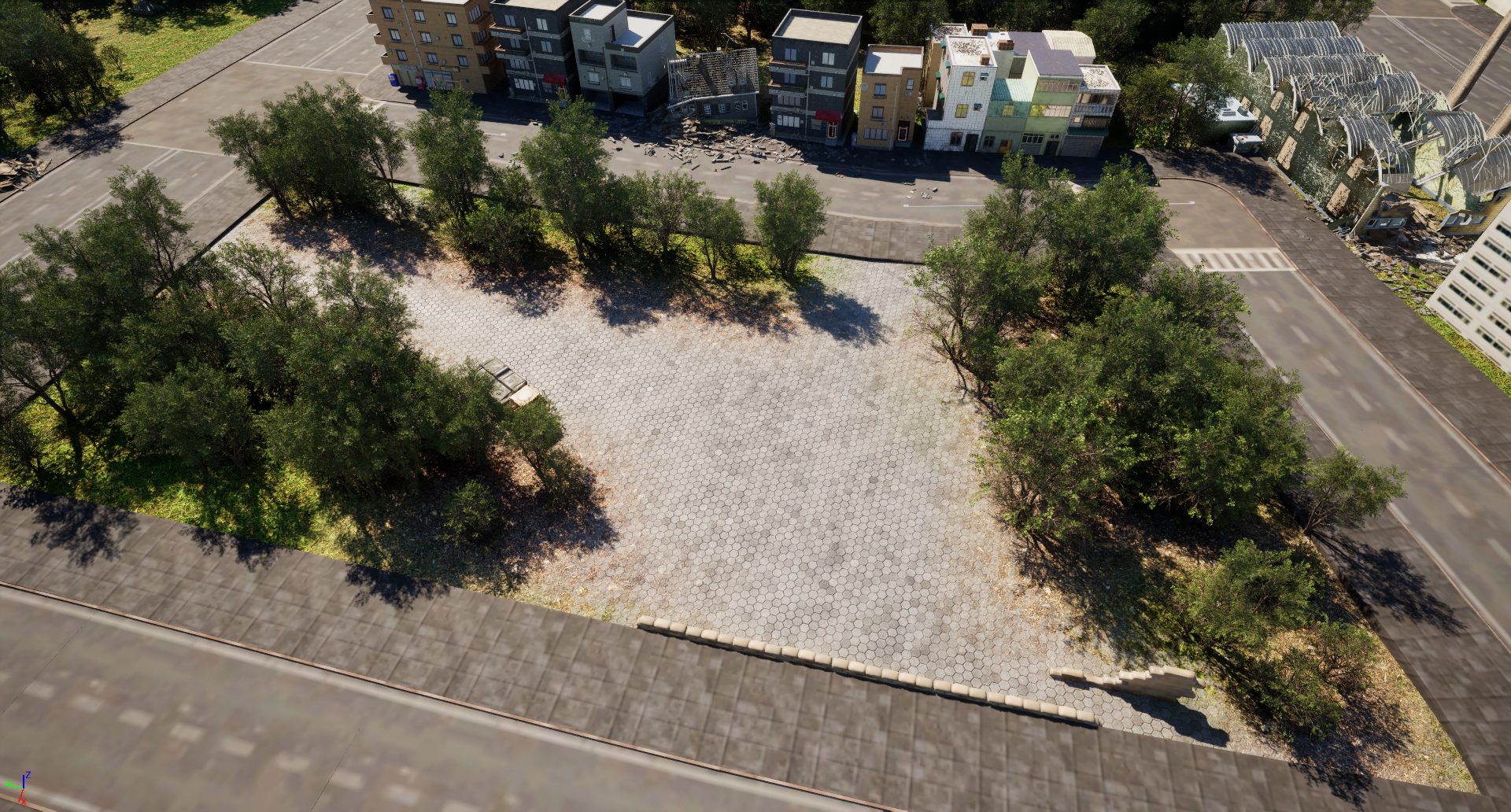
S2 新增野战工事与掩体
测试能力:低矮小目标的新增检测、分类、尺寸/朝向估计与插入定位;区分人工工事与天然/废弃堆积物。
场景范围:$220 \times 160$ m 城郊接合带,含开阔空地、矮墙、3 栋平房。
基线场景:空地无任何工事。
验证指标与通过判据:
工事新增检测召回 $\geq 0.85$,分类准确 $\geq 0.85$。
位置误差中位 $\leq 0.5$ m;堑壕/HESCO 长度误差 $\leq 15%$;朝向误差 $\leq 15^{\circ}$。
干扰项不被标为“新增工事”(误报即扣分);废弃水泥堆静默稳定。

新增工事前(baseline)

新增工事后
S3 目标消失 / 移除(负变化)
测试能力:负变化检测(最易被忽略);区分“被遮挡”与“真消失”。
场景范围:$150 \times 150$ m 院落与停车区。
基线场景:停放车辆、临时帐篷、沙袋掩体、矮墙。
验证指标与通过判据:
移除检测召回 $\geq 0.85$、精确率 $\geq 0.85$。
遮挡误判率:被遮挡但仍存在的目标被误报为“消失”的比例 $\leq 10%$。
沙袋掩体静默稳定 $S_{\text{drift}} \leq 2%$。

目标消失前(baseline)
目标消失
S4 时敏目标
测试能力:动态目标实时检测、连续跟踪、轨迹与速度估计、场景的近实时同步更新、军/民目标区分。
场景范围:$300 \times 200$ m,含一条东西主干道、一个十字路口、一个广场。
基线场景:道路空旷无车。
动态动线(时间以侦察开始为 $t=0$):
装甲车:沿主干道巡航;减速停车 5 s 后再启动(考验航迹保持与“停止≠消失”)。
皮卡:从巷口驶出,至路口右转向东,在广场停车,随后 3 名人员下车向四周疏散(5–8 m)。
步兵班:沿北侧建筑阴影行进,疏散队形(间隔 3–5 m)。
民用车(干扰,非军事目标)慢速通过,应被正确区分或按既定规则处理。
验证指标与通过判据:
各运动目标检测召回 $\geq 0.90$;检测时延 $T_{\text{lat}} \leq 2$ s。
位置 RMSE $\leq 1.0$ m;速度误差 $\leq 1.0$ m/s;V1 停车段不得误判为“目标消失”。
ID 切换 $\leq 1$ 次/目标/分钟;MOTA $\geq 0.70$。
军/民分类正确(民用车不进入军事时敏目标列表,或按规则降权)。
场景内动态目标的位姿刷新频率满足近实时门限(如 $\geq 1$ Hz,按需)。
S5 伪装、隐蔽与诱饵
测试能力:抗虚警能力 + 检出隐蔽真目标;区分真目标与诱饵。
场景范围:$200 \times 180$ m,含树林边缘、建筑阴影带。
验证指标与通过判据:
隐蔽真目标(火炮)召回 $\geq 0.80$。
诱饵误判率(把诱饵当真目标高置信上报) $\leq 20%$。
天然灌木虚警率 $\leq 10%$;烟幕区不产生几何乱更新。

带有伪装、诱饵的场景
S6 道路与通道变化(通行性语义)
测试能力:通行性语义更新(可通行 ↔ 受阻)、路障/弹坑/断桥识别。
场景范围:$280 \times 120$ m,含主路、跨河、两侧建筑。
基线场景:道路畅通、桥梁完好。
验证指标与通过判据:
障碍/损毁检测召回 $\geq 0.90$。
路段通行性状态判定正确率 $\geq 0.90$(每个路段标注 通行/受阻/断绝 三态)。
弹坑直径误差 $\leq 20%$;桥梁断面被正确识别且更新为“断绝”。

道路变化前(baseline)
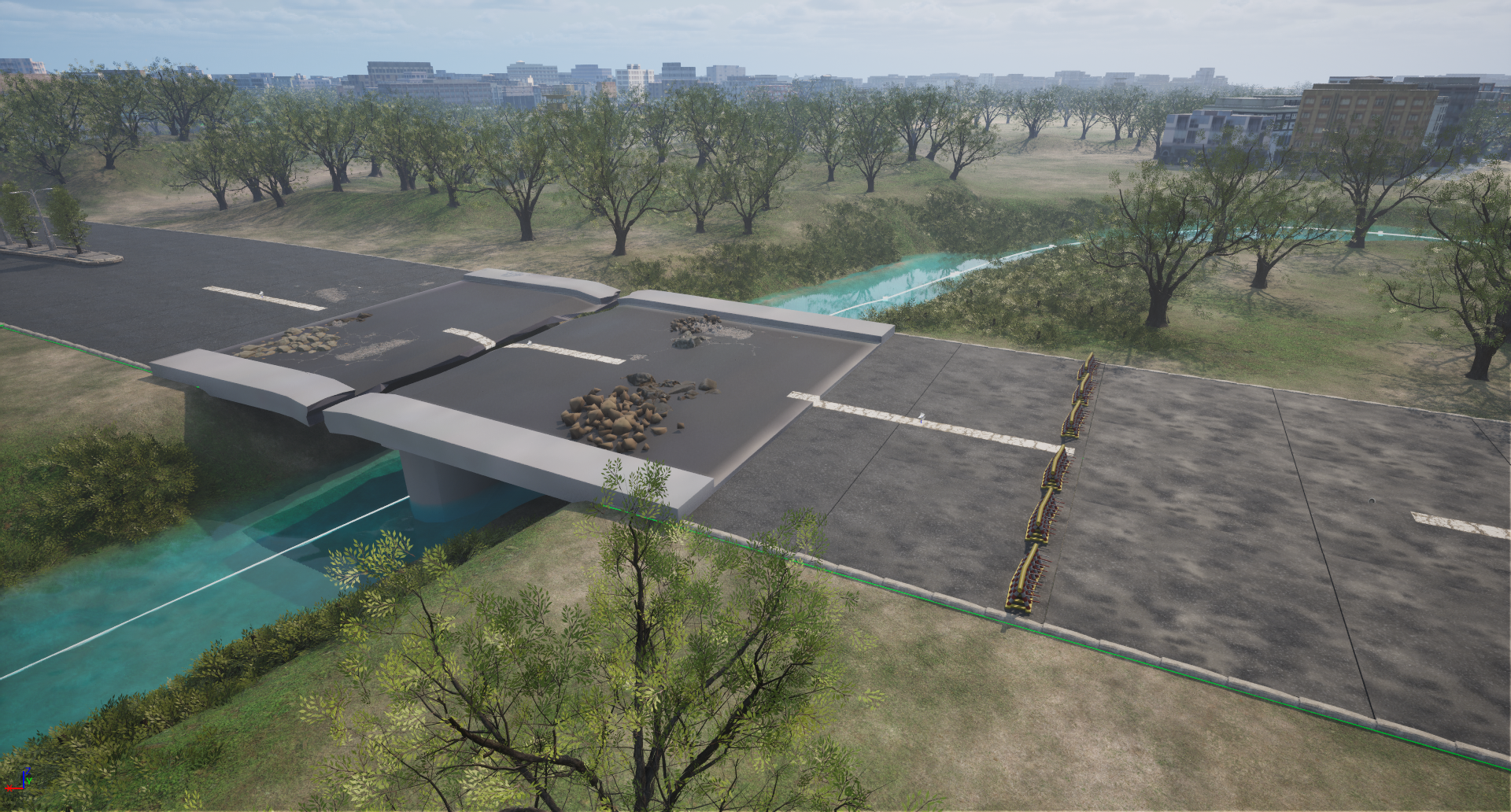
道路变化后
S7 地形与地表变化
测试能力:地表网格/高程的局部更新、弹坑与焦土/碎片场建模。
场景范围:$200 \times 200$ m 开阔地,边缘有片状植被。
基线场景:相对平整地表、完整植被。
验证指标与通过判据:
地表高程 $\text{RMSE}_{z} \leq 0.30,\mathrm{m}$。
弹坑定位误差 $\leq 0.5$ m、体积误差 $\leq 25%$、检出 $\geq 4/5$。
焦土区范围 $\text{IoU} \geq 0.6$ 且纹理类别(焦土)判定正确;倒伏植被被更新。

平整地表(baseline)

带有弹坑的地表
S8 退化感知条件下的鲁棒性
测试能力:在烟尘、雨雾、弱光、夜间、逆光等条件下保持检测/更新能力。
场景范围:复用 S1(损毁)或 S4(运动目标)的布局,仅叠加环境条件;真值变化集合固定不变(例如固定为“一栋 D3 损毁 + 一辆 V1 运动车”),以便横向对比。
条件矩阵(同一真值集合分别复测):
白天晴(基准)
黄昏弱光
夜间(需开启 IR/低照度)
局部烟幕
雨雾
扬尘
验证指标与通过判据:
对每个退化条件计算鲁棒性保持率 $\rho \geq 0.75$。
夜间条件下目标召回 $\geq 0.70$。
烟幕/雨雾区域不得产生“凭空生成”的几何(虚假更新 FP 不随能见度下降而激增)。
3. 汇总表
| 编号 | 场景 | 核心测试能力 | 关键指标 | 通过门限(建议) |
|---|---|---|---|---|
| S1 | 建筑损毁与分级 | 形变检测、损毁分级、网格替换 | 分级准确率、$\text{IoU}_{3D}$ | ±1级 $\geq 0.90$,$IoU \geq 0.5$ |
| S2 | 新增工事掩体 | 新增小目标检测/分类/定位 | 召回、分类、位置误差 | F1 $\geq 0.85$,位置 $\leq 0.5$ m |
| S3 | 目标消失 | 负变化检测、遮挡判别 | 移除召回、遮挡误判率 | 召回 $\geq 0.85$,误判 $\leq 10%$ |
| S4 | 时敏运动目标 | 实时检测/跟踪/测速/同步 | RMSE、时延、ID切换 | RMSE $\leq 1.0$ m,时延 $\leq 2$ s 【否决】 |
| S5 | 伪装与诱饵 | 抗虚警 + 检出隐蔽真目标 | 隐蔽召回、诱饵误判、虚警 | 召回 $\geq 0.80$,诱饵误判 $\leq 20%$ |
| S6 | 道路通行性 | 通行性语义更新 | 通行态判定正确率 | $\geq 0.90$ |
| S7 | 地形地表 | 高程/mesh局部更新 | $\text{RMSE}_{z}$、弹坑体积 | $\text{RMSE}_{z} \leq 0.3,\mathrm{m}$ |
| S8 | 退化感知鲁棒性 | 烟尘/弱光/夜间稳健性 | 保持率 $\rho$ | $\geq 0.75$ |